-
[퍼즐:03] 퍼즐 조각 외곽선을 각 모서리로 분할개발 2023. 8. 7. 00:26
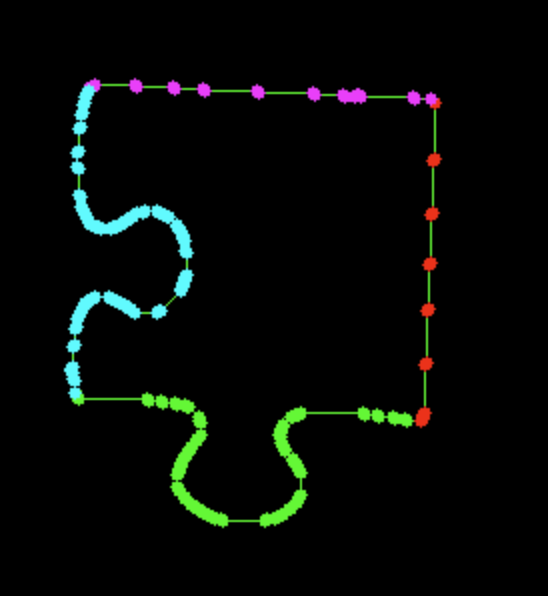
외곽선과 코너를 찾은 후 할 일은 각 외곽선을 4개의 모서리(엣지)로 나누는 것이다.
이 작업은 생각보다 간단했다.
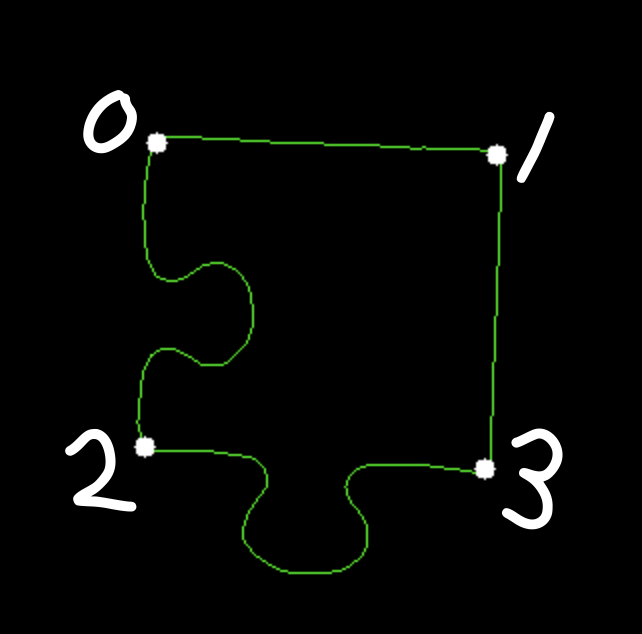
코너 4개의 번호를 0, 1, 2, 3 붙인다.
(0번과 3번은 대각선 관계에 놓이도록 지정한다.)
그리고 4개의 점으로 만드는 직사각형을 설정한다.
모든 외곽선 점을 순회하면서 직사각형의 어느 선분에 가까운 점인지 판단한다.
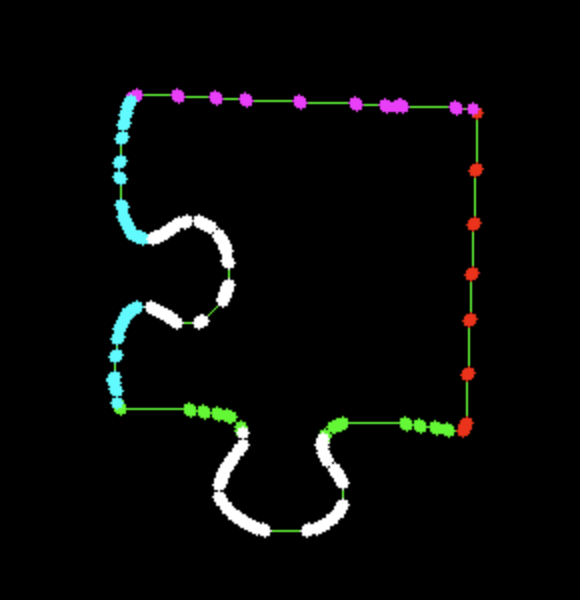
만약 점과 선분과의 거리가 멀다면 이전 점의 정보를 가져와서 사용한다.
외곽선이 연속해서 나타난다는 점을 이용했다.
흰색 점이 선분에서 먼 점이다.
copilot의 도움으로 어렵지 않게 구현할 수 있었다.
https://github.com/jkwchunjae/JigsawPuzzleSolver/commit/590465af0fc7f16a16742c25803054fd79f2a191
# 외곽선, 코너 처리 코드가 같이 있어 코드가 점점 길어지고 있음.. import cv2 import numpy as np # 한 점이 다른 선분에 얼마나 떨어져있는지 확인 def distance(x1, y1, x2, y2, x3, y3): # x1, y1 은 점 # x2, y2 는 선분의 시작점 # x3, y3 는 선분의 끝점 px = x3 - x2 py = y3 - y2 something = px * px + py * py u = ((x1 - x2) * px + (y1 - y2) * py) / float(something) if u > 1: u = 1 elif u < 0: u = 0 x = x2 + u * px y = y2 + u * py dx = x - x1 dy = y - y1 dist = np.sqrt(dx * dx + dy * dy) return dist # 이미지를 불러오고 그레이스케일로 변환 image = cv2.imread('20230804_225655_3.jpg') # image = cv2.imread('20230806_161402_3.jpg') gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) gaussian = cv2.GaussianBlur(gray, (5, 5), 0) _, black_white = cv2.threshold(gaussian, 127, 255, cv2.THRESH_BINARY) # 경계선 검출 (Canny edge detection 예제) edges = cv2.Canny(black_white, 50, 255) # 경계선 검출 결과에서 퍼즐 조각의 외곽을 감싸는 경계 상자를 찾음 contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) puzzle_contour = max(contours, key=cv2.contourArea) outline = np.zeros(image.shape, np.uint8) output = np.zeros(image.shape, np.uint8) cv2.drawContours(outline, [puzzle_contour], -1, (0, 255, 0), 1); cv2.drawContours(output, [puzzle_contour], -1, (0, 255, 0), 1); # 퍼즐 조각의 외곽을 감싸는 경계 상자를 이용하여 코너 추출 outline = cv2.cvtColor(outline, cv2.COLOR_BGR2GRAY) corners = cv2.goodFeaturesToTrack(outline, maxCorners=4, qualityLevel=0.01, minDistance=100) corners = np.int0(corners) for corner in corners: x, y = corner.ravel() # cv2.circle(output, (x, y), 5, (255, 0, 255), -1) x0, y0 = corners[0].ravel() x1, y1 = corners[1].ravel() x2, y2 = corners[2].ravel() x3, y3 = corners[3].ravel() len1 = np.sqrt((x0 - x1) ** 2 + (y0 - y1) ** 2) len2 = np.sqrt((x0 - x2) ** 2 + (y0 - y2) ** 2) len3 = np.sqrt((x0 - x3) ** 2 + (y0 - y3) ** 2) # 0번 코너와 3번 코너는 대각선으로 세팅 if len1 > len2 and len1 > len3: x1, x3 = x3, x1 y1, y3 = y3, y1 elif len2 > len1 and len2 > len3: x2, x3 = x3, x2 y2, y3 = y3, y2 e01 = [] # 0번 코너와 1번 코너 사이의 선분 위의 점들 e02 = [] # 0번 코너와 2번 코너 사이의 선분 위의 점들 e13 = [] # 1번 코너와 3번 코너 사이의 선분 위의 점들 e23 = [] # 2번 코너와 3번 코너 사이의 선분 위의 점들 e99 = [] prevIndex = 0 for point in puzzle_contour: x, y = point.ravel() d01 = distance(x, y, x0, y0, x1, y1) d02 = distance(x, y, x0, y0, x2, y2) d13 = distance(x, y, x1, y1, x3, y3) d23 = distance(x, y, x2, y2, x3, y3) # d01, d02, d13, d23 중 가장 작은 값의 인덱스를 구함 min_index = np.argmin([d01, d02, d13, d23]) min_distance = np.min([d01, d02, d13, d23]) if min_distance < 10: [e01, e02, e13, e23][min_index].append((x, y)) prevIndex = min_index else: [e01, e02, e13, e23][prevIndex].append((x, y)) e99.append((x, y)) for p in e01: cv2.circle(output, p, 3, (0, 0, 255), -1) for p in e02: cv2.circle(output, p, 3, (0, 255, 0), -1) for p in e13: cv2.circle(output, p, 3, (255, 0, 255), -1) for p in e23: cv2.circle(output, p, 3, (255, 255, 0), -1) # for p in e99: # cv2.circle(output, p, 3, (255, 255, 255), -1) # 결과 이미지 출력 cv2.imshow('Puzzle Area', output) cv2.waitKey(0) cv2.destroyAllWindows()'개발' 카테고리의 다른 글
[퍼즐:05] 모서리 테스트 (0) 2023.08.11 [퍼즐:04] 퍼즐 모서리 정규화 (0) 2023.08.08 [퍼즐:02] 퍼즐 조각 외곽선에서 코너 검출 (0) 2023.08.06 [퍼즐:01] 퍼즐 조각 외곽선 추출 (0) 2023.08.06 [퍼즐:00] 직소 퍼즐 맞추는 프로그램 단계 (0) 2023.03.02